思岚SLAMTEC A1开箱测试

一、测试坏境
①、SLAMTEC A1激光雷达;
②、Ubuntu16.04 下 ROS Kinetic。
二、测试功能
①、运行ROS包,查看雷达数据
②、使用hector_slam进行建图
三、具体实现过程
1、建立ROS工作空间
1
| mkdir -p ~/dev/catkin_ws/src
|
进入src文件:
初始化工作空间
在src文件中创建了一个 CMakeLists.txt 的文件,告诉系统ROS的工作空间。
2、下载ROS相关的功能包
在src目录下 下载SLAMTEC的激光雷达ROS包
1
| git clone https://github.com/Slamtec/rplidar_ros.git
|
下载Hector_SLAM建图
1
| git clone https://github.com/tu-darmstadt-ros-pkg/hector_slam.git
|
3、在工作空间中编译
1
2
| cd ~/dev/catkin_ws/
catkin_make
|
添加环境变量source
1
| source ~/dev/catkin_ws/devel/setup.bash
|
(为了让source永久生效,应该写入.bashrc文件中)
1
2
3
| echo"source~/dev/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
|
4、驱动安装
源码安装 rplidar-ros 雷达驱动
1
| sudo apt-get install ros-kinetic-rplidar-ros
|
源码安装 hector_slam库
sudo apt-get install ros-kinetic-hector-slam
在rplidar_ros中新建slam.launch文件(非常重要,不然会报错)
在rplidar_ros/launch/目录下添加slam.launch文件:
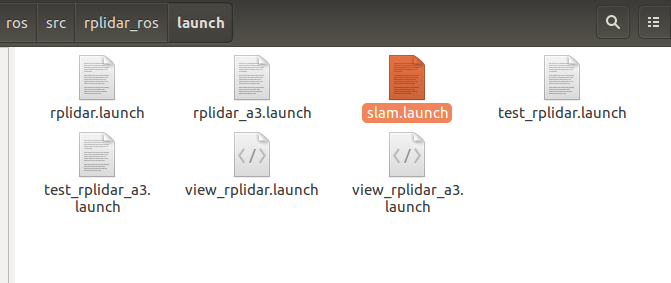
slam.launch文件中复制如下内容
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
| <launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="base_frame" value="base_link" />
<param name="odom_frame" value="base_link" />
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<!--<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.7" />
<param name="map_update_distance_thresh" value="0.2"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
<param name="scan_topic" value="scan"/>
</node>
<node pkg="tf" type="static_transform_publisher" name="base_to_laser_broadcaster" args="0 0 0 0 0 0 /base_link /laser 100"/>
<node pkg="rviz" type="rviz" name="rviz"
args="-d $(find hector_slam_launch)/rviz_cfg/mapping_demo.rviz"/>
</launch>
|
5、连接雷达

雷达连接好后会出现usb串口
查看usb串口及权限
对应的文件号应该是ttyUSB0
给串口文件号ttyUSB0添加写权限为:666
1
| sudo chmod 666 /dev/ttyUSB0
|
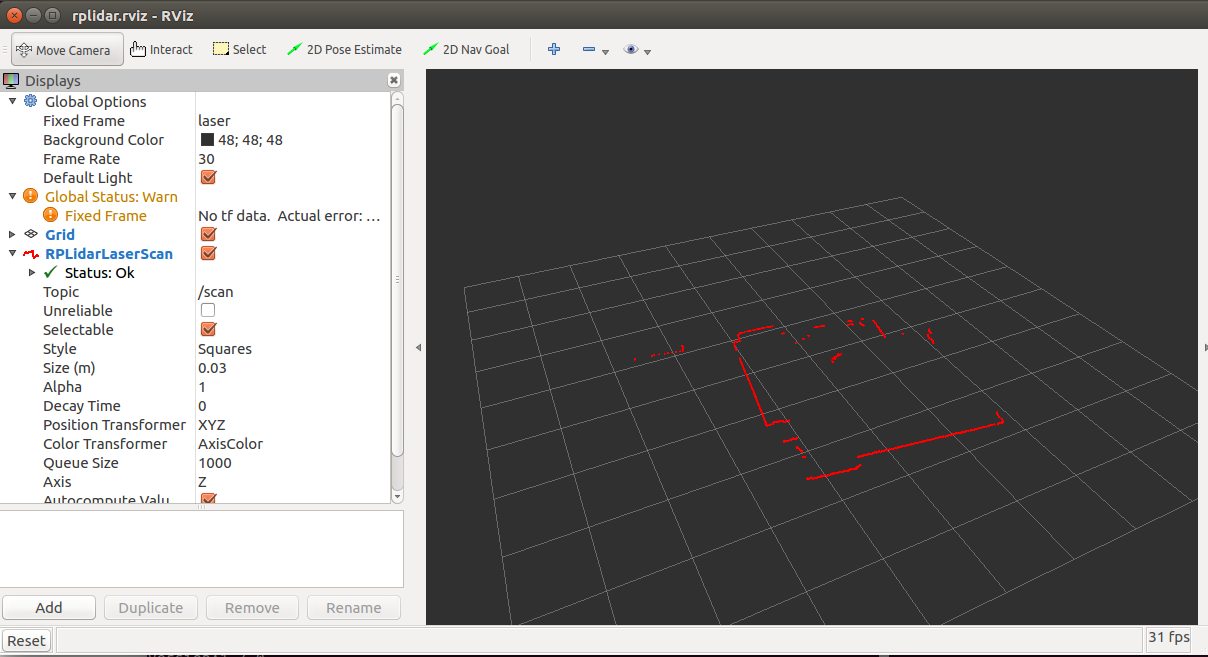
6、使用rviz雷达数据
1
2
| roscore
roslaunch rplidar_ros view_rplidar.launch
|
7、在终端查看雷达数据
启动ros主节点以及启动激光雷达
1
2
| roscore
roslaunch rplidar_ros rplidar.launch
|
启动rplidarNodeClient节点,在终端查看数据
1
| rosrun rplidar_ros rplidarNodeClient
|

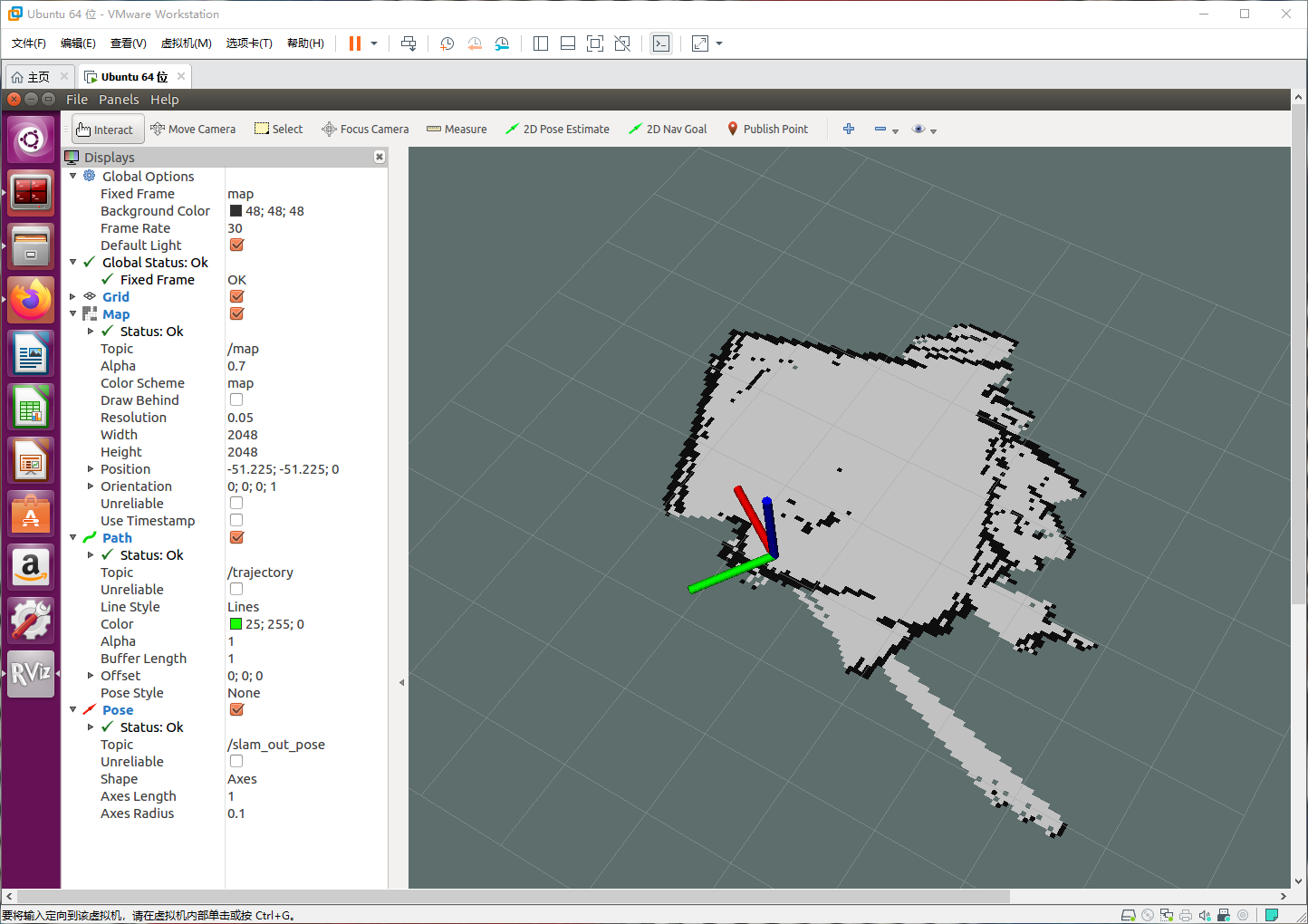
8、使用Hector_SLAM建图
1
2
| roscore
roslaunch rplidar_ros slam.launch
|
如果出现如下报错
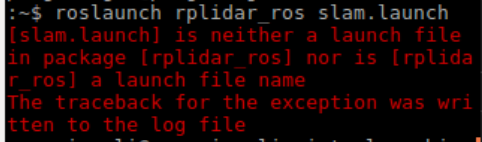
进入到rplidar_ws目录下
1
2
3
| cd ~/rplidar_ws
source devel/setup.bash
roslaunch rplidar_ros slam.launch
|
一定要切换rplidar_ws到此目录下在启动命令;
9、保存slam得到的地图信息
先安装map_server包;
1
| sudo apt-get install ros-kinetic-map-server
|
然后,保存图形。
1
| rosrun map_server map_saver -f ~/my_map
|
注:
进入roscoore,有时会使用CTRL+Z误操作关闭了ROS进程;
解决方案:
1
2
3
| killall -9 roscore
killall -9 rosmaster
|
参考:https://blog.csdn.net/NouriXiiX/article/details/102690064
https://blog.csdn.net/t624124600/article/details/110723844


.jpg)
